On February 29th, the journal “Nature Communications” published the latest research on the development of a novel magnetic-controlled capsule robot by Professors Li Liang and Cao Quanliang from the Wuhan National High Magnetic Field Center. The paper, titled "Magnetically driven capsules with multimodal response and multifunctionality for biomedical applications," has our university as the sole responsible institution. Doctoral students Yuxuan Sun and Wang Zhang are the co-first authors, while Professors Li Liang and Cao Quanliang serve as co-corresponding authors. Other contributors to the research include Professor Enmin Song from the School of Computer Science and Technology, Professor Kailin Cai from the Union Hospital of Tongji Medical College, Professor Wu Qiu from the School of Life Science and Technology, as well as Professors Xiaotao Han, Yiliang Lyu, and Postdoctoral Fellow Shaowei Ouyang from the center.
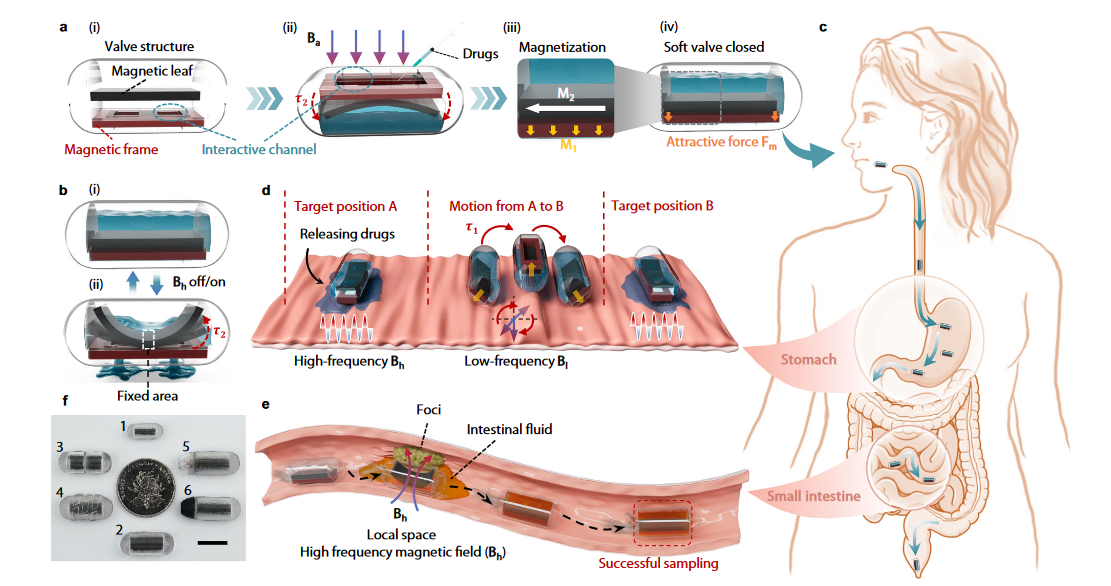
Fig. 1 Structural design, function and application of MagCaps.
In this work, we describe the development of small-scale magnetically driven capsules with a distinct magnetic soft valve made of dual-layer ferromagnetic soft composite films (Fig. 1). A core technological advancement achieved is the flexible opening and closing of the magnetic soft valve by using the competitive interactions between magnetic gradient force and magnetic torque, laying the foundation for the functional integration of both drug release and sampling. Meanwhile, we propose a magnetic actuation strategy based on multi-frequency response control and demonstrate that it can achieve effective decoupled regulation of the capsule’s global motion and local responses. Finally, through a comprehensive approach encompassing ideal models, animal ex vivo models, and in vivo assessment, we demonstrate the versatility of the developed magnetic capsules and their multiple potential applications in the biomedical field, such as targeted drug delivery and sampling, selective dual-drug release, and light/thermal-assisted therapy.

Fig. 2 In vivo demonstration of MagCaps in a rabbit’s stomach model.
The integration of magnetic soft robotics into capsule design has broken the traditional design constraints. The controllable magnetic soft valve and multimodal actuation method provide a foundation for the MagCaps to perform integrated functions such as targeted drug delivery, controlled release, and on-demand heating. These advancements make the MagCaps a promising tool for the diagnosis and treatment of GI diseases.
This research was funded by the National Natural Science Foundation of China Innovative Research Group and the National Pulsed High Magnetic Field Science Center's Interdisciplinary Fund . It also received strong support from the experimental testing platforms of the National Pulsed High Magnetic Field Science Center, including those for magnetic material performance control and magnetic measurements.
Link: https://www.nature.com/articles/s41467-024-46046-9

 Chinese
Chinese